Card-Dealing Robot
This was a one-week project with the objective of integrating mechanical and electrical components into a functional device. My partner and I decided to make a card-dealing robot as a challenge.
Skills
- Microcontroller programming - Project Code
- SolidWorks
- 3D Printing
Design Details
Our card-dealing robot has two main parts: the base and the rotating card holder.
The base houses the electronics, including an Arduino, motor controller, battery, and power distribution circuit. A small opening in the base allows an IR receiver to receive signals from a remote controller. It also secures a servo motor that can rotate the card holder.
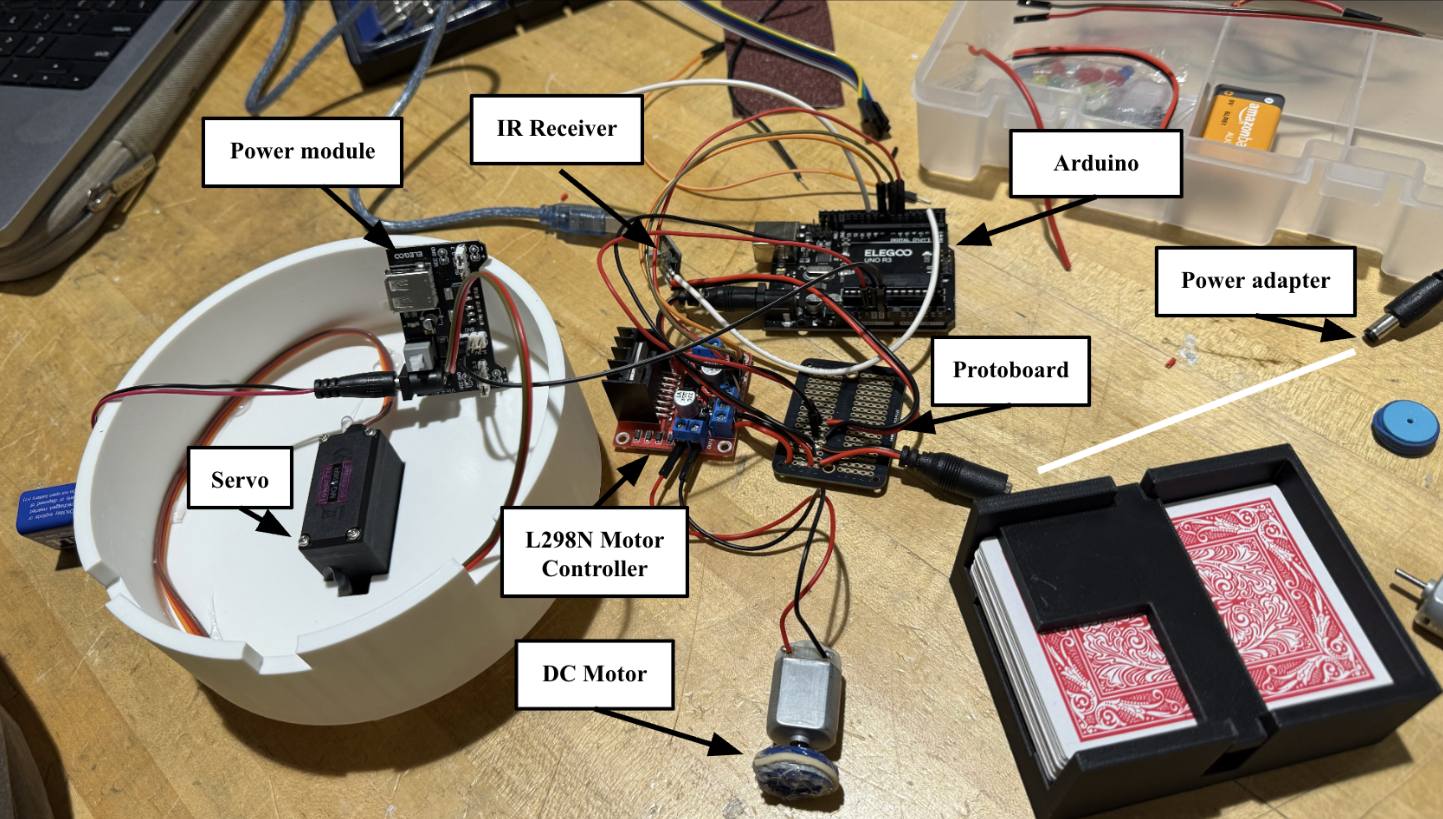
The rotating card holder sits on top of the servo motor so that it can be rotated and deal to different players. It has a DC motor on top that can deal cards one at a time, and adjust in height as the deck shrinks.
Challenges
The biggest challenge was designing the dealing mechanism to deal one card at a time. This involved designing a mechanism to secure the dealing motor while allowing it to adjust to the changing deck height, and finding the optimal motor speed to deal a single card at a time.
We had several iterations of the card holder and motor mounts. Early designs had the motor on the bottom of the deck, with a slit for the bottom card to be dealt. Other designs kept the motor at the back of the card, or did not have the tilt of the deck. After thorough testing, we settled on the iteration shown in the demo.
Team
Duke MEMS student April Lee led the design of the mechanical components for this project, while I led the electronics implementation.